1.概况
bv伟德源自英国始于1946人工智能与机器人研究所,以智能制造为背景,聚焦特种机器人和人工智能技术,将人工智能、机器人技术、视觉检测、控制技术和互联网技术等进行有机融合,开展跨学科科学研究和技术攻关。团队现有教授3人,副教授2人,讲师4人;在学历层次上有博士学历5名,硕士学历4人。目前指导博士研究生6名(含职工2名),硕士研究生50余名。
人机所研究方向包括特种机器人、智能装备研究、复杂装备系统故障诊断与健康管理、视觉检测等方向。研究所具有良好的科研和实验环境,拥有视觉双臂协同机器人、四足机器人开发平台、高精度固态激光雷达、紫外UV工业相机、人体视觉伺服开发平台、开源水下机器人、高性能图形工作站、双目测距平台等科研资源。先后承担“自动操控与状态感知”、“智能焊接设备及产线”、“远程诊脉与听诊系统研制”、“高效绝缘机器人研制”、“双目视觉水下机器人关键技术及应用”、“斯特林发动机性能寿命测试实验台”、“数控机床健康管理系统研发”等各级课题20余项,与北方重工业集团、西安核设备有限公司、兵器工业203所、中航动力股份有限公司、中航工业西安航空发动机集团有限公司、中船重工西安东仪科工集团有限公司等科研单位进行深入研究合作,科研经费达1000余万元。
研究所将科研方向和员工培养相结合,采取“项目、竞赛、创新创业并重”的培养措施,根据员工志愿和项目具体情况,将研究生与本科生引入到团队的科研项目当中,通过自学和教师指导的方式,迅速提高相关理论和技术水平。当项目成熟后,鼓励和指导员工参加竞赛,通过竞赛锻炼实践能力。目前研究所在老员工科技竞赛和创新创业领域做出了突出的贡献,先后在互联网+、挑战杯等各类赛事奖项50余项。
联系电话:029-86173306
地址:陕西省西安市bv伟德源自英国始于1946(710021)
2.人员组成

田军委:工学博士,教授,博导,人工智能与机器人研究所所长,2009年毕业于西安交通大学控制工程与科学专业,2018年赴美国加州大学Merced分校访学,访学研究方向为智能与无人系统。主要研究方向为特种机器人技术、视觉检测技术、智能测控技术、智能装备技术等。共承担纵向、横向项目30余项,科研经费1000余万元目前承担科研项目5项,其中部(省)级3项。在国内外学术刊物上发表论文100余篇,出版学术专著1部;获省部级科技成果奖1项、地市级科技奖3项。授权专利20余项,其中发明专利7项。

来跃深:教授,硕导。1988年毕业于复旦大学无线电物理专业。主要从事计算机控制与测量研究、教学工作,发表学术论文40余篇;主持、参与研究项目30余项。主持、参与的科研项目获总后勤部科技二等奖1项,校级二等奖5项,校级教改项目一等奖1项,校级优秀教师1次。获国家实用新型专利4项,指导全国老员工电子设计大赛多次获奖。

尚雅层:教授,硕导,1991毕业于西北工业大学,获硕士学位。主要从事机械电子系统的研发与教学工作,发表学术论文30余篇;主持、参与科研项目20余项,专利授权5项,主编教材《机电控制基础》、参编教材《液压与气压传动》。

王沁:硕士,副教授,硕导,智能制造与工业工程系副主任,人工智能与机器人研究所副所长,主要研究方向:机电系统设计,嵌入式控制系统设计。主持陕西省科技厅、西安科技局等纵向课题7项,横向课题6项,到款经费100余万元。发表论文10余篇,其中SCI检索4篇,EI检索1篇,核心期刊5篇,授权专利30余项,其中发明专利12项。

苏宇:工学博士,副教授,硕导,2014年毕业于西安电子科技大学机械电子工程专业。主要研究方向为特种机器人技术;绳牵引并联机器人技术;机器人控制技术。发表学术论文13篇,其中SCI检索3篇,EI检索5篇;授权专利11项,其中发明专利4项;主持纵向课题4项,作为主要成员参与国家自然科学基金2项。
张震:工学博士,讲师,硕导,2019年毕业于西安电子科技大学机械设计及其自动化专业。主要研究方向为波动、振动、智能机器人技术以及电子机械系统动力学与控制。主持陕西省科技厅和教育厅科研项目2项。已发表论文4篇,其中SCI论文3篇,Top期刊1篇。发表实用新型专利1项。
赵鹏:硕士,讲师。主要研究方向为工业设计研究,复杂型面设计及制造技术。发表学术论文8篇,其中EI检索1篇。授权专利10余项;主持西安市未央科技局和榆林市科技局科研项目2项,横向科研10余项。
李刚:工学博士,讲师。主要研究方向为机械故障诊断技术、计算智能及机电一体化技术,共承担纵向、横向项目10余项,在国内外学术期刊发表学术论文近20篇,参与译著1部,授权专利5项。
张云辉:工学博士,讲师。主要研究方向计算机图形学、图像处理和计算几何等。发表8篇论文,其中EI检索5篇,参与2项国家自然科学基金。
3.主要研究方向
(1)特种机器人:针对于特殊环境、恶劣环境、极端环境下的特种作业需求,重点研制物料搬运机器人、管道机器人、绝缘作业机器人、水下作业机器人等,解决分布式控制、人机协同控制、复杂环境感知、环境建模、传感器信息融合和运动轨迹规划等问题。代表性成果有:


架空裸导线绝缘涂覆机器人 双目视觉水下机器人
(2)智能装备研究:针对智能制造业及智能民用设备,凝聚智能装备的研究内容为:①智能焊接产线与设备,重点研究智能焊接产线与设备设计和制造问题;②电力设施监测设备,重点解决电力设施运行状况监测问题,导线线径测量问题等;③智能远程诊脉设备,解决脉象的远程测量与复原。代表性成果有:
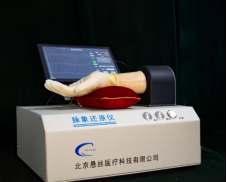

远程中医诊疗系统医生端与复原端

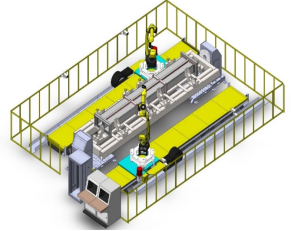
多目多场域在线温度监测系统机器人焊接产线与设备示意图
(3)复杂装备系统故障诊断与健康管理:针对国防军工、智能制造、数字化生产等关键应用领域中的复杂设备和智能制造装备的可靠运行维护及安全保障的迫切需求和广阔应用前景,侧重从理论技术与工程实现角度,解决复杂装备的动态特性分析与致灾机理、状态发生与感知设备研制、装备工况状态的有效检测与故障诊断方法、基于大数据的装备性能状态评估与趋势分析、装备监测诊断与健康管理软硬件系统等关键技术问题。代表性产品有:
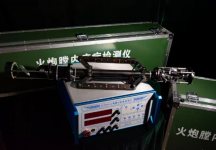
火炮膛内疵病检测系统矿用设备在线故障诊断系统



自动操控与状态感知系统
(4)视觉检测:针对于基于视觉的智能检测和智能伺服领域,重点研究方向为:双目视觉测量、技术机器人环境建模和定位导航技术、车间动态目标检测方法、面向机械臂手眼系统的三维视觉测量系统和立体视觉校正方法。


双目视觉测距仪电力系统线径仪视觉刀具检测仪
4.部分科学研究
[1] 陕西省科技统筹创新工程计划项目:水下双目机器人关键技术及其应用,项目编号2015KTZDGY-02-01,2016.01-2023.12,在研,项目主持人:田军委.
[2] 陕西省科技厅重点研发项目:智能划线机器人研究,项目编号2020GY-160,2020.01-2021.12,结题,项目主持人:来越深。
[3] 陕西省科技厅重点研发项目:UAV/UGV协同长时多任务作业轨迹规划方法研究,项目编号2020GY-188,经费10万,2020.01-2021.12,结题,项目主持人:王沁.
[4] 陕西省科技厅自然科学基础研究项目:用于震后应急救援的无人机集群绳牵引并联机器人关键理论和技术研究,项目编号2020JM-558,经费5万,2020.01-2021.12,结题,项目主持人:苏宇.
[5] 陕西省科技厅自然科学基础研究项目:空间索杆铰接式伸展臂振动带隙特性研究,项目编号2023-JC-YB-386,经费5万元,2023.01-2024.12,在研,项目主持人:张震.
[6] 陕西省科技厅工业攻关项目:20KW级太阳能热发电斯特林发动机性能试验加热炉关键技术的研究,项目编号2016GY-175,2016.01-2017.12,结题,项目主持人:王沁.
[7] 智能焊接设备及产线,项目编号H202301014,经费500万,2022.12-2027.11,在研,项目主持人:田军委.
[8] 远程诊脉与听诊系统研制,项目编号H202203032,经费110万,2022.01-2022.12,结题,项目主持人:田军委.
[9] 高效绝缘机器人研制,项目编号H202203031,经费100万,2021.12-2022.12,结题,项目主持人:田军委.
[10] 智能测温系统研制,项目编号H202104068,经费100万,2021.03-2023.03,结题,项目主持人:王沁.
[11] 核工程焊接机器人预研项目,项目编号H202209161,经费37万,2022.07-2023.07,结题,项目主持人:田军委.
[12] HP信息综合处理组件国产化(含软件测试)及手持调试设备开发合同研制,项目编号:H202305131(N),经费83.5万,2023.05-2024.05,在研,项目主持人:田军委.
[13] 自动操控及状态感知功能验证系统,项目编号:B20201219,经费55万,2020.12-2021.12,结题,项目主持人:田军委
[14] 火炮膛内疵病自动检测系统维修,项目编号:H202209162,经费8.8万,2022.08-2023.08,结题,项目主持人:田军委
[15] XXX试验装置研制,项目编号:B20190914,经费28万,2019.08-2019.09,结题,项目主持人:田军委
5.主要成果展示
(1)获奖成果:
[1] 高精度智能扬尘浓度检测终端,陕西高等学校科学技术研究优秀成果三等奖,2022年.
[2] 大功率斯特林发动机燃气式加入炉,陕西省科技工作者创新创业大赛三等奖,2021年.
[3] 带机械臂的水下作业机器人,陕西省科技工作者创新创业大赛三等奖,2019年.
(2)专利成果:
[1] 苏宇,王永妮,赵鹏. 基于绳牵引的飞行载物机器人及方法,发明专利,中国:ZL20170312231.3,2023-09-26.
[2] 苏宇,李琼,陈峰,张吉,李沁洋,雷志强. 一种用于无人机续航的地面移动中继站及其方法,发明专利,中国:ZL201810535690.9,2023-08-01.
[3] 王沁,田军委,赵彦飞,张吉,黄聪,乔路,雷云. 一种水下机械臂的模拟测试装置,发明专利,中国:ZL201711091318.5,2023-07-28.
[4] 田军委,王沁,丁瑞敏,张雷.一种水下执行器及其方法.发明专利,中国:ZL 2018 1 1384964.5,2023-06-23.
[5] 田军委,王沁,苏宇,赵鹏,丁瑞敏,冯琳. 一种双臂形的水下机器人.发明专利,中国:ZL 201811384964.5,2023-06-23.
[6] 苏宇,熊靖武,张吉,乔路,孙江龙,王轩.一种水下机器人及其方法.发明专利,中国:ZL201711090844.X,2023-06-23.
[7] 苏宇,李琼,汪思祎,李沁洋,王沁,赵鹏. 一种飞行器的电池更换系统及其更换方法.发明专利,中国:ZL201810535891.9,2023-06-23.
[8] 王沁,陈桦,田军委,乔路,苏宇,王佳基于多目标优化的多UAV/UGV协同长时作业路径规划方法.发明专利,中国:ZL202010806361.0,2023-05-26.
[9] 王沁,赵鹏飞,苏宇,卯福航,张帆.一种无人机中继站及其方法. 发明专利,中国:ZL201810121999.3,2023-05-12.
[10] 田军委,乔路,赵彦飞,雷志强,田嘉瑶,赵鹏飞.一种紧凑型高推动比水下机器人.发明专利,中国:ZL201810121999.3,2023-02-17.
[11] 王沁,陈桦, 乔路,田军委,苏宇.UAV/UGV协同长时多任务作业轨迹规划方法.发明专利,中国:ZL201910731995.1,2022-12-30.
[12] 田军委,闫明涛,张震,苏宇,赵鹏,徐浩铭,杨寒.视觉伺服机械臂物品抓取最佳位姿检测方法.发明专利,中国:ZL202110097875.8,2022-09-27.
[13] 王沁,田军委,苏宇,王佳,张震,金旭辉,杨寒.一种具备喷药功能的充电型果园果害识别机器人.发明专利,中国:ZL202011405578.7,2022-09-09.
[14] 田军委,张磊蒙,黄书召,苏宇,金旭辉,张云辉.改进自适应遗传-变邻域协同搜索的多无人机长时工作路径规划方法.发明专利,中国:ZL202110097896.X,2022-09-06.
[15] 王沁,苏宇,张震,关宇辰,杨寒,田军委.一种果园除草防控方法及其除草防控机器人.发明专利,中国:ZL202111058635.3,2022-07-07.
[16] 田军委,丁瑞敏,张震,王沁,赵鹏,苏宇.一种水下双臂机器人装置.发明专利,中国:ZL202010741359.X,2022-04-29.
[17] 田军委,乔路,苏宇,王沁,赵鹏,李刚.高楼玻璃幕墙自动清洗机器人及其方法.发明专利,中国:ZL201710324649.2,2022-04-05.
[18] 王沁,苏宇,金旭辉,柴孟豪,田军委.一种用于灾后救援的机械狗系统.发明专利,中国:ZL202011320670.3,2022-04-05.
[19] 田军委,张研,高昊兰,王沁,苏宇,冯宇鹏,牛创吉.一种移动式园艺浇灌系统.发明专利,中国:ZL202010030930.7,2022-04-05.
[20] 王沁,苏宇,张雷乐,孙丽娜,蒋志毅.一种管道机器人及其清洁方法.发明专利,中国:ZL201811094822.5,2021-04-20.
(3)论文成果:
[1] Zhen Zhang, Qin Wang, Yu Su, Junwei Tian, Xingang Wang, Shoumin WANG. The influence of component defect states on bandgaps of 2D composite beam frame structures[J], AIP Advances, 2023, (13): 045220. (SCI)
[2] Yu Su, Yuanying Qiu, Peng Liu, Junwei Tian, Qin Wang, Xingang Wang. Dynamic Modeling, Workspace Analysis and Multi-Objective Structural Optimization of the Large-Span High-Speed Cable-driven Parallel Camera Robot[J]. Machines, 2022,10(7): 565. (SCI)
[3] Qin Wang, Jinke Jiang, Junwei Tian, Yu Su, Junde Guo. Design and Analysis for Hypoid Gears with Ease-Off Flank Modification[J]. Applied Sciences-Basel,2022, 12(2): 822. (SCI)
[4] Qin Wang, Hua Chen, Junwei Tian, Jia Wang, Yu Su. Biobjective UAV/UGV Collaborative Rendezvous Planning in Persistent Intelligent Task-Based Wireless Communication[J], Wireless Communications and Mobile Computing, 2021, 2021: 9578783 (SCI)
[5] Qin Wang, Hua Chen, Lu Qiao, Junwei Tian, Yu Su. Path planning for UAV/UGV collaborative systems in intelligent manufacturing[J], IET Intelligent Transport Systems, 2020,14(11): 1475-1483. (SCI)
[6] Zhen Zhang, Tuanjie Li, Zuowei Wang, Yaqiong Tang. Band gap characteristics of flexural wave of two-dimensional periodic frame structure composed of locally resonant composite beam, Mechanical Systems and Signal Processing, 2019, 131(15): 364-380. (SCI)
[7] Zhen Zhang, Tuanjie Li, Yaqiong Tang. Traveling wave analytical solutions of vibration band gaps of composite periodic beams, Journal of Vibration and Control, 2019, 25(2): 460-472. (SCI)
[8] 苏宇,仇原鹰,韦慧玲.考虑绳索质量和惯性力影响的绳牵引并联机器人动力学建模和张力优化求解[J].工程力学, 2016, 33(11):231-239.(EI)
(4)员工获奖:
[1] 智能自上线带电涂覆机器人,第五届中国研究生机器人创新设计大赛全国二等奖,2023年.
[2] 脉诊远程医疗系统,第五届中国研究生机器人创新设计大赛全国二等奖,2023年.
[3] 瀚海苍穹-海洋装备水下检测专家,第二届中国研究生“双碳”创新与创意大赛全国二等奖,2023年.
[4] 基于太阳能光伏发电系统的清洁机器人,第九届中国研究生智慧城市技术与创意设计大赛全国三等奖,2023年.
[5] 一种基于5G蜂窝移动网络的多功能模块化环境监测的飞行机器人,第九届中国研究生智慧城市技术与创意设计大赛全国三等奖,2023年.
[6] 家庭智能服务机器人,第五届中国高校智能机器人创意大赛全国一等奖,2022年.
[7] 一种智能浇花式机器人,第五届中国高校智能机器人创意大赛全国二等奖,2022年.
[8] 智能光伏清洁机器人设计与分析,第一届中国研究生“双碳”创新与创意大赛全国二等奖,2022年.
[9] 农业综合作业机器人,中国研究生乡村振兴科技强农+创新大赛“苏研杯”第三届科技作品竞赛全国二等奖,2022年.
[10] 无人机可移动式地面续航中继站,第五届中国研究生机器人创新设计大赛全国三等奖,2022年.
[11] 精“测”智“维”——双光谱远距场域测温卫士,第八届中国国际“互联网+”老员工创新创业大赛陕西赛区三等奖,2022年.
[12] 一种家庭助老机器人,第12届过程装备实践与创新赛全国二等奖,2021年.
[13] 基于机器视觉的机械臂手势控制,第三届中国研究生人工智能创新大赛全国三等奖,2021年.
[14] 基于残差网络和迁移学习的苹果果害分类方法,第三届中国研究生人工智能创新大赛全国三等奖,2021年.
[15] 基于深度学习的苹果果害识别及履带机器人应用,第二届中国研究生人工智能创新大赛全国三等奖,2020年.
[16] 家庭机器狗,第11届过程装备实践与创新赛全国二等奖,2020年.
[17] 基于深度学习的果害识别及其机器人系统,第一届研究生人工智能创新大赛全国三等奖,2019年.
[18] 地空联动机器人作业系统,第一届中国研究生机器人创新设计大赛全国三等奖,2019年.
[19] “戴胜”智慧农业专家,第四届“互联网+”老员工创新大赛,陕西赛区银奖,2018年.
[20] Underwater Ranger,第三届“互联网+”老员工创新大赛,陕西赛区金奖,2017年.



 快速链接
快速链接
 关注微信平台
关注微信平台